A Small Humanoid Robot System Development
Shanghai Jiao Tong University, 2006-2008
Description
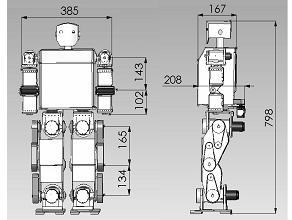
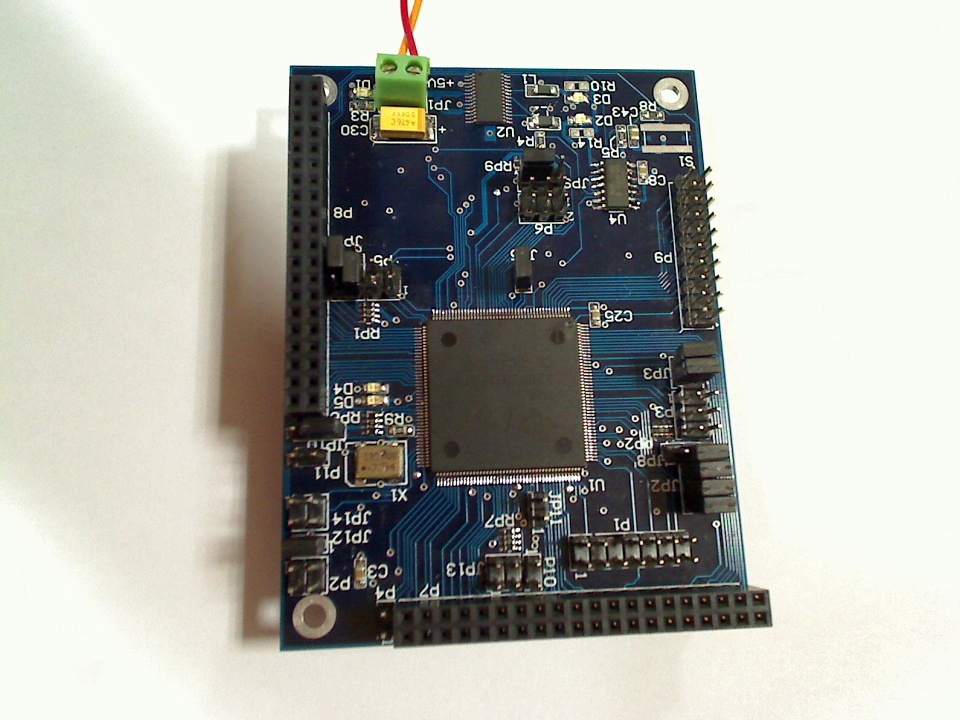
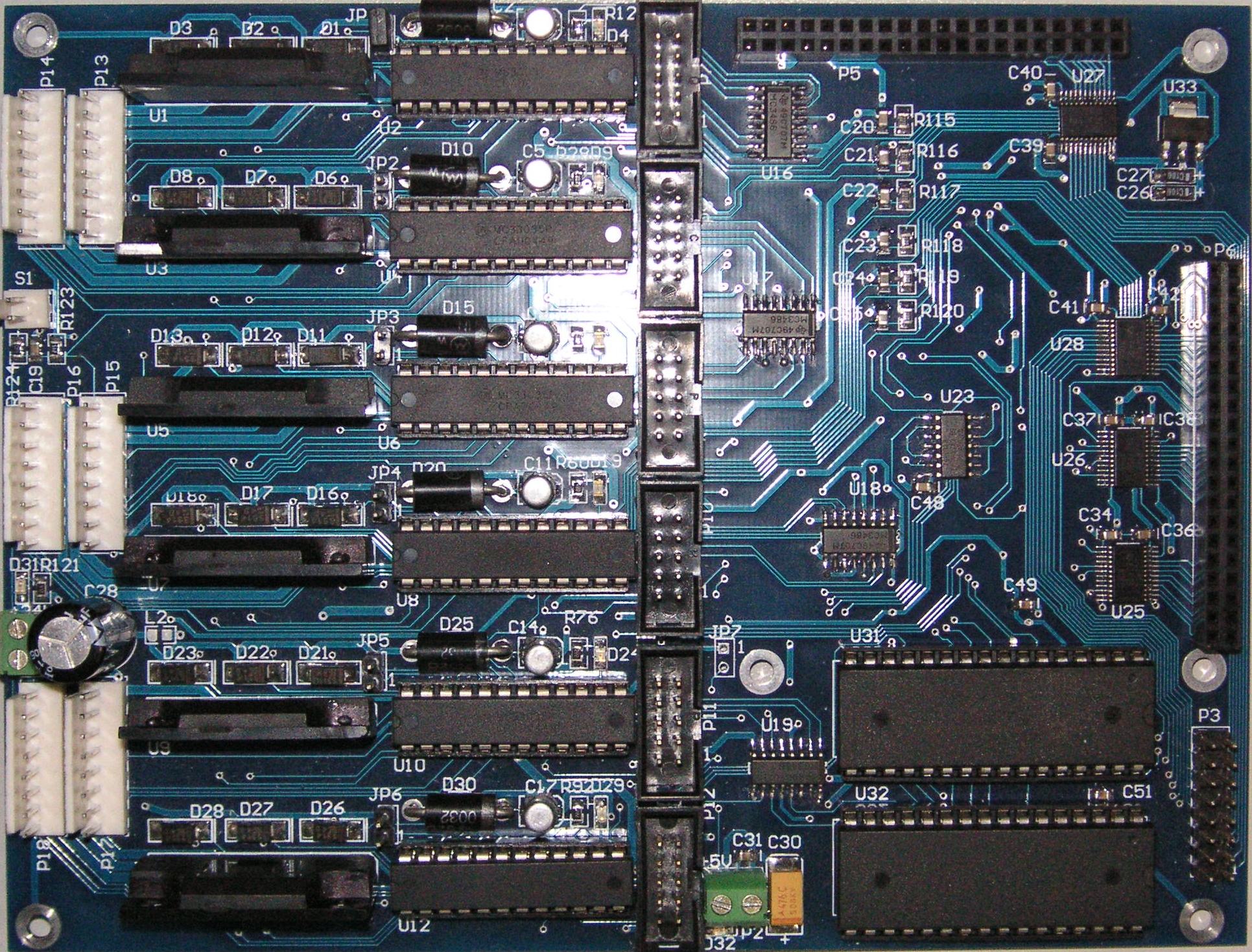
Designed and implemented the complete control system architecture for a small full-body humanoid robot, including a CAN-based distributed motor control subsystem with TI F2812 DSPs, PCB design, high-precision 6-DoF motor control, and real-time biped walking control in C/C++.
Publications
- [Journal] Design and Implementation of Motor Control System for Small Humanoid Robot (in Chinese), ZHANG Yi, LIU Cheng-gang, XING Deng-peng, COMPUTER ENGINEERING, 2009, 35(24)
Patents:
- Electric Wire Driven Actuator for Artificial Joint, ZL200710038296.6 (Issued)
- General Distributed Control System for Humanoid Robots, ZL200910054322.3 (Issued)
- Distributed Dual-bus Motion Control System for Humanoid Robots, 200810038844.X (Published)
Demos
Motor control system integration test